排序(Sorting)
- n个记录的序列按照对应的关键字满足的关系,成为一个按关键字有序的序列
- 稳定性:序列Ri领先于Rj,当关键字相等时,排序后的序列中Ri仍领先于Rj,则称排序方法是稳定的;反之,称排序算法是不稳定的
- 快速排序、堆排序和希尔排序等时间性能较好的排序方法是不稳定的
- 排序方法可分为内部排序和外部排序
- 内部排序:指待排序记录存放在计算机随机存储器中进行的排序过程
- 外部排序:指待排序记录的数量很大,以至内存不能一次容纳全部记录,在排序过程中尚需对外存进行访问的排序过程
直接插入排序(Straight Insertion Sort)
将一个记录插入到已排好序的有序表中,从而得到一个新的、记录数值1的有序表
时间复杂度为O(n2)
若带排记录序列为正序时,时间复杂度可提高至O(n),适合于序列基本有序的情况
空间复杂度O(1)
//从小到大 void InsertSort(int R[],int n) //待排序关键字存储在R[] { int i,j; int temp; for(i=1;i<n;++i) { temp=R[i]; //将待插入的关键字暂存于temp中 j=i-1; while(j>=0&&temp<R[j]) { R[j+1]=R[j]; //大于待排关键字,后移一位 --j; } R[j+1]=temp; //找到插入位置 } }
折半插入排序
- 基本思想与直接插入排序类似,区别是查找插入位置的方法不同,折半插入排序采用折半查找法来查找插入位置
- 序列已经有序
- 所需附加空间和直接插入排序相同,时间上比较,折半插入查找仅减少了关键字间的比较次数,记录的移动次数不变,时间复杂度为O(n2)
*2-路插入排序
希尔排序(Shell’s Sort)
- 又称‘’缩小增量排序‘’(Diminishing Increment Sort)
- 基本思想:先将整个带排记录序列分割成若干子序列分别进行直接插入排序,待整个序列中的记录“基本有序”时,再对全体记录进行一次直接插入排序。
- 子序列的构成不是简单地“逐段分割”,而是将相隔某个增量(步长)记录组成一个子序列
- 算法最开始以一定的步长进行排序。然后会继续以一定步长进行排序,最终算法以步长为1进行排序。当步长为1时,算法变为插入排序,这就保证了数据一定会被排序。
- 增量序列中的值应尽量没有除1以外的公因子
- 时间复杂度
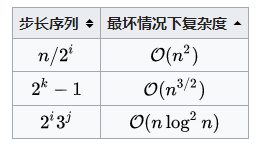 ???
???
起泡排序(Bubble Sort)
首先将第一个记录的关键字和第二个记录的关键字进行比较,若为逆序,则将两个记录交换,然后比较第二个记录和第三个记录的关键字。依次类推,直至第n-1个记录和第n个记录的关键字进行过比较为止。这称作第一趟起泡排序
然后进行第二趟起泡排序,对前n-1个记录进行相同的操作,其结果是使关键字次大的记录被安置到第n-1个位置上,依次类推,直到结束
判别起泡排序结束的条件:在一趟起泡排序过程中没有进行交换记录的操作
时间复杂度:O(n2)
void BubbleSort(int R[],int n) { int i,j,flag; int temp; for(i=n-1;i>=1;--i) { flag=0; //标记本趟排序是否发生交换 for(j=1;j<=i;++j) { if(R[j-1]>R[j]) { temp=R[j]; R[j]=R[j-1]; R[j-1]=temp; flag=1; } } if(flag==0) //说明序列已经有序 return; } }
快速排序(Quick Sort)
基本思想:通过一趟排序将待排记录分割成独立的两部分,其中一部分记录的关键字均比另一部分记录的关键字小,则可分别对这两部分记录继续进行排序,以达到整个序列有序
任取一个记录作为枢轴(支点),将所有关键字比它小的记录安置在它的位置之前,所有关键字比它大的记录安置到它的位置之后,将序列分割成两个子序列。这个过程称为一趟快速排序。
在对分割所得的两个子序列进行快速排序,直至待排序列中只有一个记录。
时间复杂度:O(nlogn);同数量级的排序方法中,其平均性能最好
空间复杂度:O(logn),递归需要栈的辅助
void QuickSort(int R[],int low,int high)//对从R[low]到R[high]的关键字进行排序 { int temp; int i=low,j=high; if(low<high) { temp=R[low]; while(i<j) //一趟排序,即将数组中大于temp的关键字放在右边,小于temp的放在左边 { while(j>i&&R[j]>=temp) --j; //从右往左扫描,找到一个小于temp的关键字 if(i<j) { R[i]=R[j]; //放在temp左边 ++i; //i右移一位 } while(i<j&&R[i]<temp) ++i; //从左往右扫描,找到一个大于temp的关键字 if(i<j) { R[j]=R[i]; //放在temp右边 --j; //j左移一位 } } R[i]=temp; //将temp放在最终位置 QuickSort(R,low,i-1); //递归,对temp左边的关键字进行排序 QuickSort(R,i+1,high); //递归,对temp右边的关键字进行排序 } }
简单选择排序(Selection Sort)
通过n-i次关键字间的比较,从n-i+1个记录中选出关键字最小的记录,并和第i(1<=i<=n)交换
时间复杂度:O(n2)
void SelectSort(int R[],int n) { int i,j,k; int temp; for(i=0;i<n;++i) { k=i; for(j=i+1;j<n;++j) //从无序序列中找到最小值 if(R[k]>R[j]) k=j; temp=R[i]; R[i]=R[k]; R[k]=temp; } }
*树形选择排序(Tree Selection Sort)(锦标赛排序)
堆排序(Heap Sort)
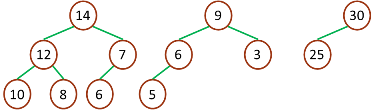
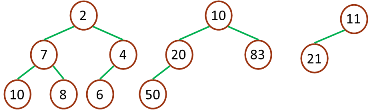
将序列看成是一个完全二叉树,则堆的含义表明,完全二叉树中所有非终端结点的值均不大于(或不小于)其左、右孩子结点的值;由此,则堆顶元素(根)必为序列中n个元素的最小值(或最大值)。
输出堆顶的最小值之后,使得剩余n-1个元素的序列重建成一个堆;反复执行,得到一个有序序列,这个过程称为堆排序
最大堆
最小堆
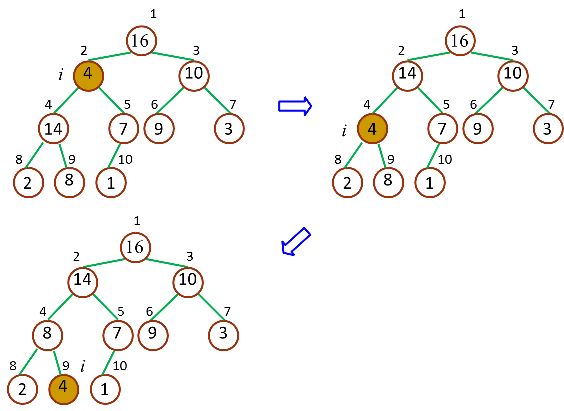
创建最大堆(Build-Max-Heap):将堆所有数据重新排序,使其成为最大堆,由无序列表建成一个堆
最大堆调整(Max-Heapify):将堆的节点作调整,使得子节点永远小于父节点
堆排序在最坏的情况下,时间复杂度也为O(nlogn)
空间复杂度O(1),仅需一个记录大小供交换用的辅助存储空间
void Sift(int R[],int low,int high) //关键字从数组下标1开始 { int i=low,j=2*i; //R[j]是R[i]的左孩子结点 int temp=R[i]; while(j<=high) { if(j<high&&R[j]<R[j+1]) //若右孩子较大,则把j指向右孩子 ++j; if(temp<R[j]) { R[i]=R[j]; //将R[j]调整到双亲节点的位置 i=j; j=2*i; } else break; //调整结束 } R[i]=temp; //被调整的结点放入最终位置 } void heapSort(int R[],int n) { int i; int temp; for(i=n/2;i>=1;--i) //建立初始堆 Sift(R,i,n); for(i=n;i>=2;--i) //进行n-1次循环,完成堆排序 { temp=R[1]; R[1]=R[i]; R[i]=temp; Sift(R,1,i-1); } }
归并排序(Merging Sort)
- “归并”:将两个或两个以上的有序表组合成一个新的有序表
- 假设初始序列有n个记录,看成是个有序的子序列,每个子序列长度为1,然后两两归并;得到的有序子序列再两两归并,……,直至得到一个长度为n的有序序列为止,这种排序算法称为2-路归并排序
- 多路归并排序
- 时间复杂度:O(nlogn)
- 需要和待排记录等数量的辅助空间
基数排序(Radix Sorting)
- 基本思想:从最低位开始,依次进行一次稳定排序,位数不足的前面补0,直到最高一位也完成一次稳定排序。
- 最高位优先法(MSD法)
- 最低位优先法(LSD法)
- 链式基数排序
- 时间复杂度:O(d*n)
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!